
软体机器人(Soft Robotics)是一种模拟自然界软体生物(如蚯蚓,章鱼和乌贼等)生理结构和运动机能的新型智能机器人。与传统刚性机器人不同,软体机器人通常由低模量的智能仿生致动器组成,并能够在外界的刺激下实现抓取、爬行和扭动等复杂形变。这类新型机器人通常与生物体相似,具有更高的自由度和连续形变的能力,可适应复杂的环境并出色地完成既定任务。开发仿生软体机器人一直是世界各国研究人员的目标,软体机器人在工业生产、人机交互、医疗服务和军事侦察等领域都有着广阔的应用前景。近日,实验室与美国肯特先进材料与液晶研究所李全院士合作,在国际权威材料期刊《Angewandte Chemie International Edition》上发表题为“Near-Infrared Light-Driven Shape-Morphing of Programmable Anisotropic Hydrogels Enabled by MXene Nanosheets”的重要研究文章,报道了一种具有形状可编程特性的近红外光驱动MXene/水凝胶软体智能致动器。该工作被同时选为当期“Hot Paper”和“Frontispiece”(Angewandte Chemie International Edition, 2021, 60, 3390-3396).

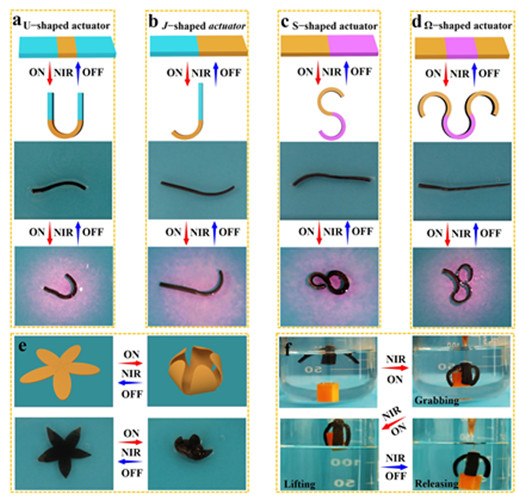
我们首先设计并合成了一种新型表面功能化的可光聚合二维MXene纳米单体,不仅大幅度提高了二维MXene纳米片在水凝胶网络中的均匀分散性,还实现了二维MXene纳米片与温敏水凝胶的原位自由基聚合。发现该二维MXene纳米单体在直流电场作用下,能够沿着电场方向上呈现一定的浓度梯度分布,因此,可用于制备具有优异性能的各向异性MXene复合水凝胶。通过精确控制ITO电极图案、直流电场方向和光聚合掩膜模式,开发了一系列形状可编程的近红外光驱动各向异性MXene/水凝胶智能致动器。最后,我们成功制备了一种光驱动仿生四臂软体抓手,通过近红外光远程操控,实现了对水下目标物体的精确抓取、移动和卸载等功能。该研究成有望在未来人造肌肉、人机交互和水下软体机器人等仿生智能领域获得重要应用。
文章第一作者是天津大学材料学院王玲教授实验室博士研究生雪盼,论文合作者为芬兰坦佩雷大学(Tampere University)智能光子材料实验室曾浩博士和Arri Priimagi教授,论文通讯作者为天津大学材料学院王玲教授、许鑫华教授和美国肯特先进材料与液晶研究所李全院士, 相关研究获得中国国家自然科学基金和芬兰科学院基金等项目支持。